MIT ‘mech suit’ helps robots move smoothly following human lead (VIDEO)

The aim to make a robot with a human touch has proved to be quite a challenge for engineers and scientists. However, a team from the Massachusetts Institute of Technology believes they have come up with the best solution yet, by getting the human body to control the robot’s movements.
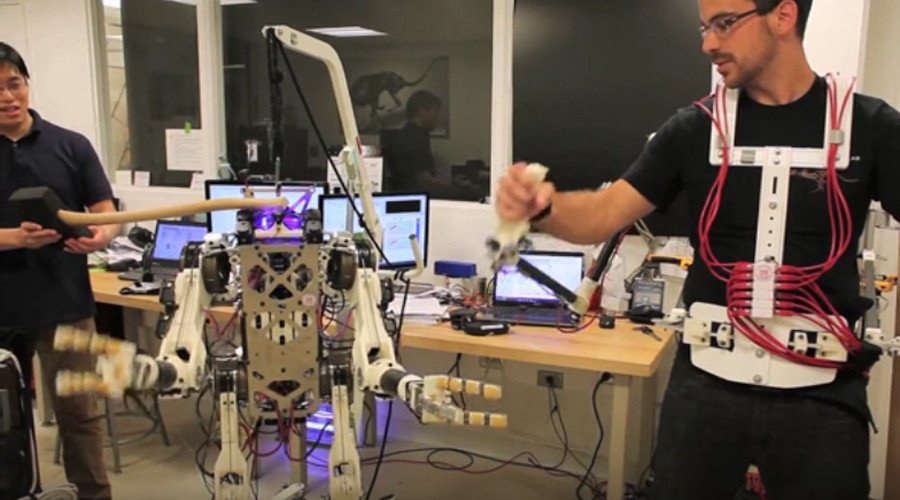
The team from MIT has created a “mech suit” to control the robot, which the researchers have christened HERMES. The metal body is able to copy the movements that the human controller makes, leading to much greater precision.
“We tried to give the human as much freedom as possible, so the suit is a full body suit and the human can move both arms and both legs and the idea is that the robot will follow exactly the same way,” said Joao Ramos, a PhD student from MIT.
Part of the problem is many mechanical engineers in the past have tried to create intelligence within a robot so it is self-functioning. While this is fine for menial tasks, the robot lacks the skills to undertake more delicate operations, such as picking up a glass of water without spilling anything.
“The human also has hand controllers and he can push a couple of buttons and these buttons are responsible for controlling the hands of the robot so we can control the force with which the robot is grasping the object,” Ramos added, in a video that was posted on MIT’s YouTube page.
The team from MIT believes the robot could have a use in the future.
“HERMES is a humanoid platform that we have been trying to develop to deploy in disaster situation scenarios. When you want to deploy a human, but it is too dangerous, we wanted to deploy something that could do the work as a human would be able to do,” said Ramos.
It is one thing for a robot to be set into the core of a nuclear reactor, which is highly radioactive. However, if it falls over 30 seconds after being placed there, it is of little use. Albert Wang, who is also a PhD student at MIT, says this is an issue they are trying to address.
“For humanoid robots, keeping balance is key to any task. We have decided to tackle this head on by feeding the balance sensations of the robot back to the human. That way, we can take advantage of the natural reflexes and the learning capability of the human, which will keep the robot balanced,” Wang mentioned.
The robot has a camera instead of a head. Information from the robot’s point of view is sent back to goggles, which the human is wearing. When the robot is moving in tight areas or performing delicate tasks, the goggles help to give the human greater control in manipulating the robot.
At present, the whole of the robot is controlled by humans using the mech suit, but the ultimate aim is to try to implement some human intelligence within the robot.
“The robot has been designed to be stronger than a person, so we would like to merge some level of autonomous control along with the human’s intelligence,” Ramos added.
READ MORE:Robot cheetah taught to jump obstacles using laser sight (VIDEO)
While the MIT team is still finding their ‘feet’ with two legs, it would seem they are having even greater success with four. In May, they developed a robot called Cheetah 2, which can see and jump over obstacles like a hurdler using an on-board laser devise.
The robot was first tested on a treadmill and was able to jump objects up to 45cm tall while running at a speed of 8km per hour. It estimates an object’s height and distance, then gauges the best position from which to jump, adjusts its stride to land just short of the obstacle and finally exerts enough force to get itself over.
It was then tested on an indoor track where it managed to hurdle 90 percent of obstacles successfully.
"A running jump is a truly dynamic behavior. You have to manage balance and energy, and be able to handle impact after landing. Our robot is specifically designed for those highly dynamic behaviors," Assistant Professor Sangbae Kim said.












