Bio-inspired soft robot goes off-leash (VIDEO)
The latest in robotic design is leading to ‘new creatures’ that can move without constraint, withstand harsh temperature changes, ambulate over a variety of surfaces and even ‘limbo’. The newest model has recently been let off the leash.
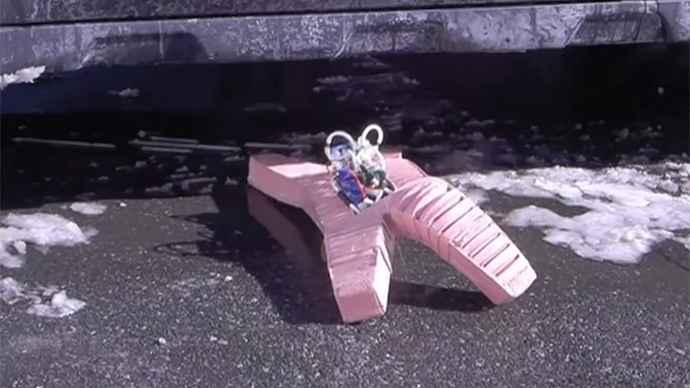
The latest ‘soft’ robot from Professor George M. Whitesides Research Group at Harvard uses embedded pneumatic networks that enable movement by pressurizing particular channels.
The work is possible because of collaborations happening across the sciences combining organic chemistry, soft materials science and robotics.
Unlike a 2011 version of the soft robot, which was tethered to external air compressors, the new silicone rubber robot comes with an embedded battery pack and can walk unaided for two hours.
The soft robot is made of silicone rubber shell that is tough and can withstand subzero temperatures, (tested down to -9 degree Celsius), 40 km/h winds, puddles of water up to 5cm deep and 3,000 Kelvin methane flames for up to 50 seconds.
“It’s also resistant to acid,” said Spectrum magazine.
The robot can lift weights of up 8kg, and can move in a straight line or turn. It moves at about 0.5cm per second. And since it is soft and spineless it can also squeeze through gaps.
The machine has several styles of movement – walking, crawling and slithering. These are created when air is pumped into the limbs, inflating and deflating compartments to provide structure and rigidity to aid ambulation.
The robots are fabricated using different manufacturing techniques such as photolithography and microfluidics. By using the same principles for locomotion, Whitesides’ group makes a soft polymer mold with channel structures pumped with air.
“It’s not an elaborate concept, but the kind of motion you can achieve this way is really pretty remarkable,” Whitesides told the American Scientist. “You get very interesting movements in these limbs with very simple actuation and control.”
Whitesides points out that although the motions and the body plan of the robot do resemble those of soft animals such as starfish, their aim is to mimic the function rather than the mechanism. Through the embedded pneumatic network the soft robot can change its curvature from convex to concave, various modes of locomotion and a flexible tentacle.
The current model of the robot has one weak spot: the ‘backpack’ with battery pack and air compressors, which makes it vulnerable to destruction. The project is predictably funded by the Defense Advanced Research Projects Agency, an agency of the Department of Defense responsible for developing new technology for use by the military.